服部様、お世話になります。
これは困りました。そちらでは問題が再現しないということですね?お使いのプログラムは、GitHubのリポジトリの最新版ですね?
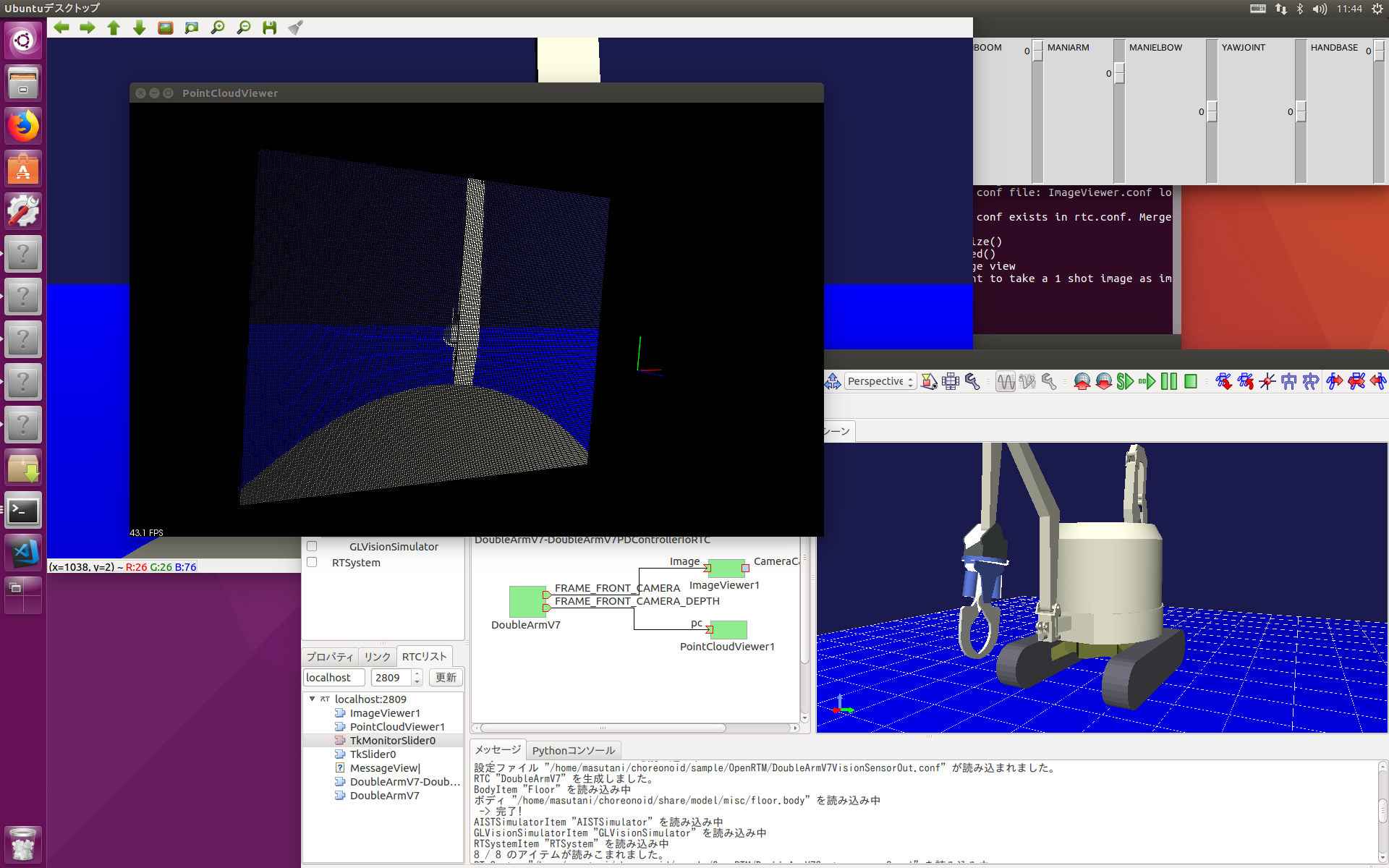
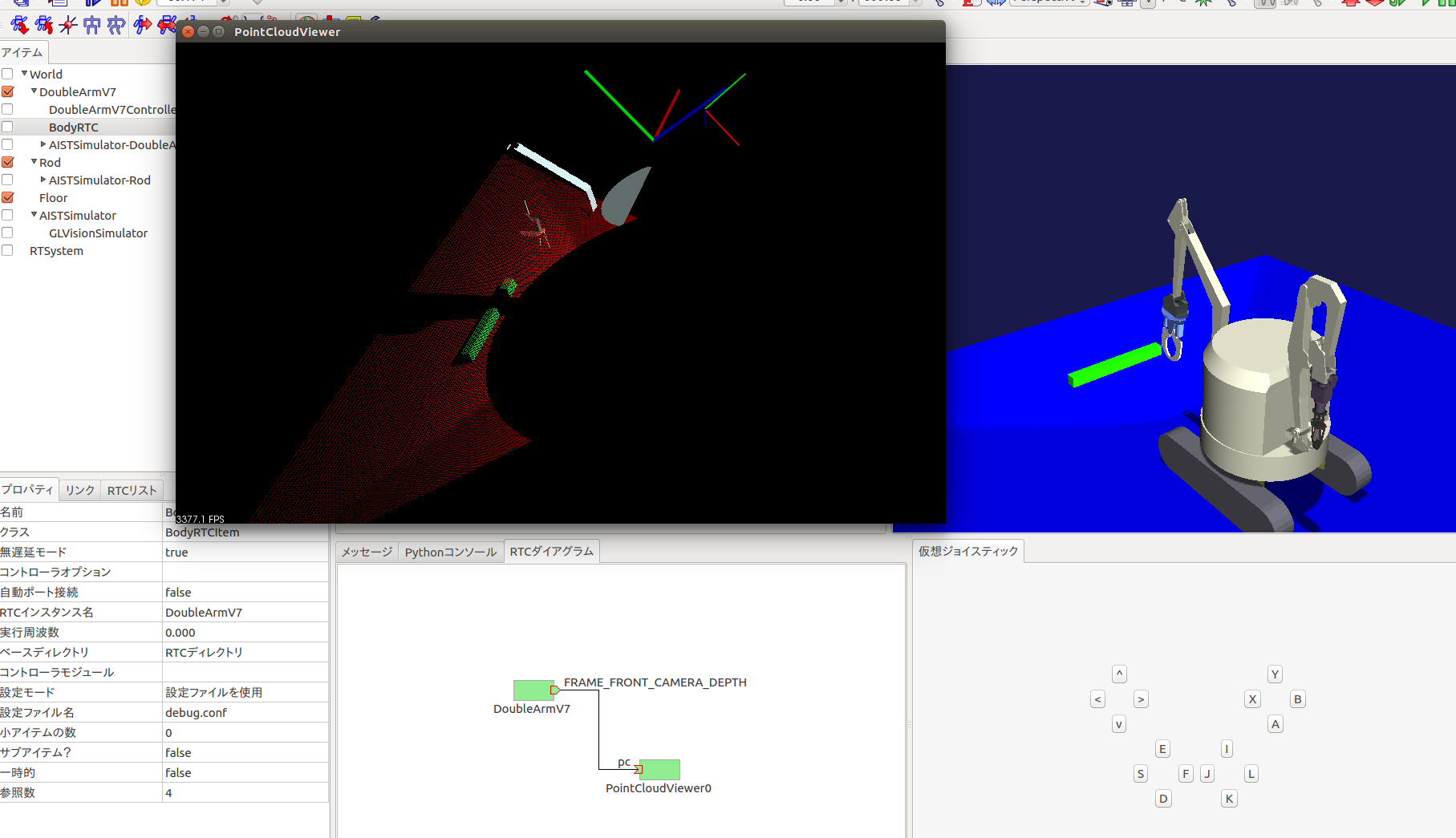
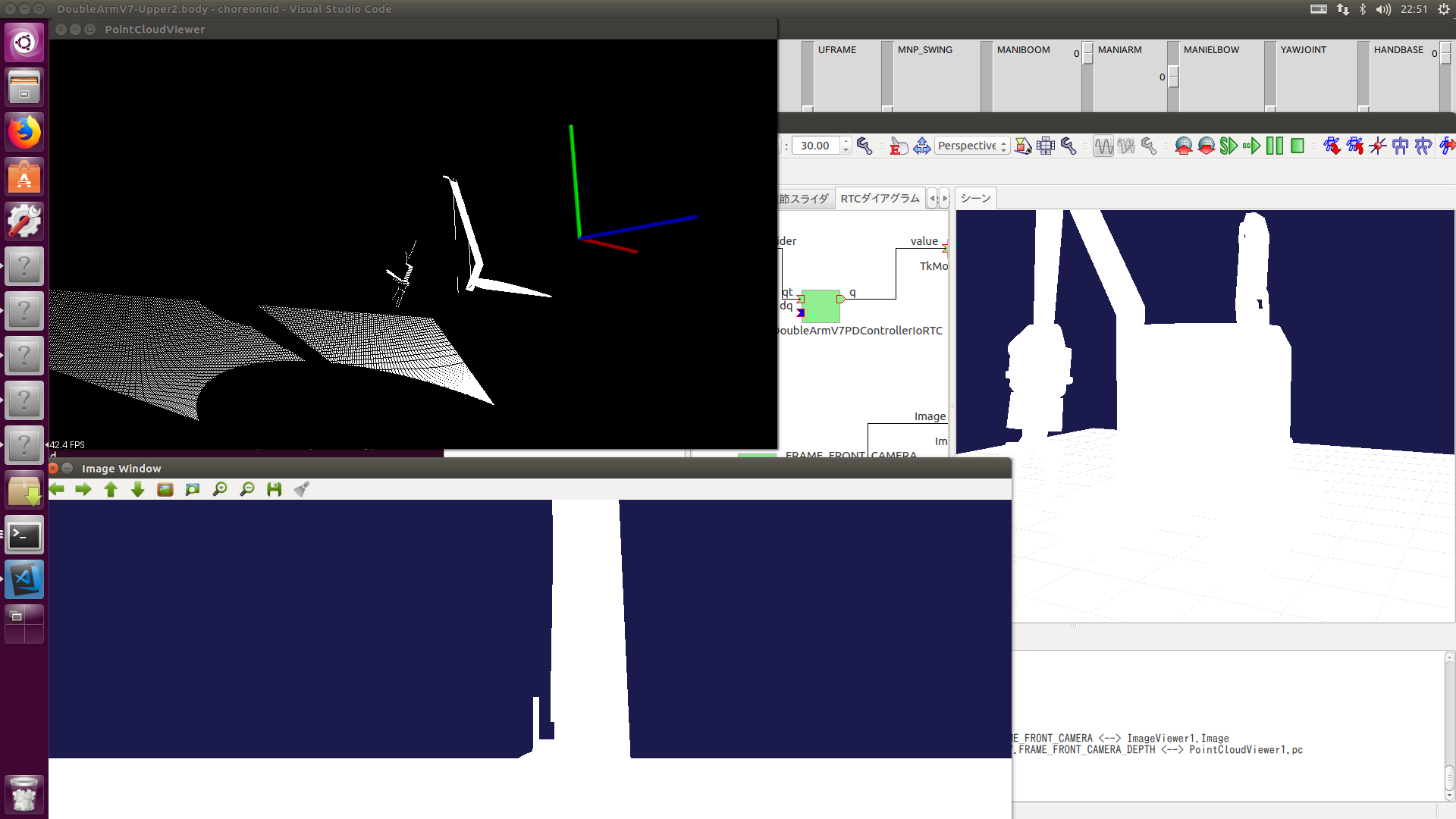
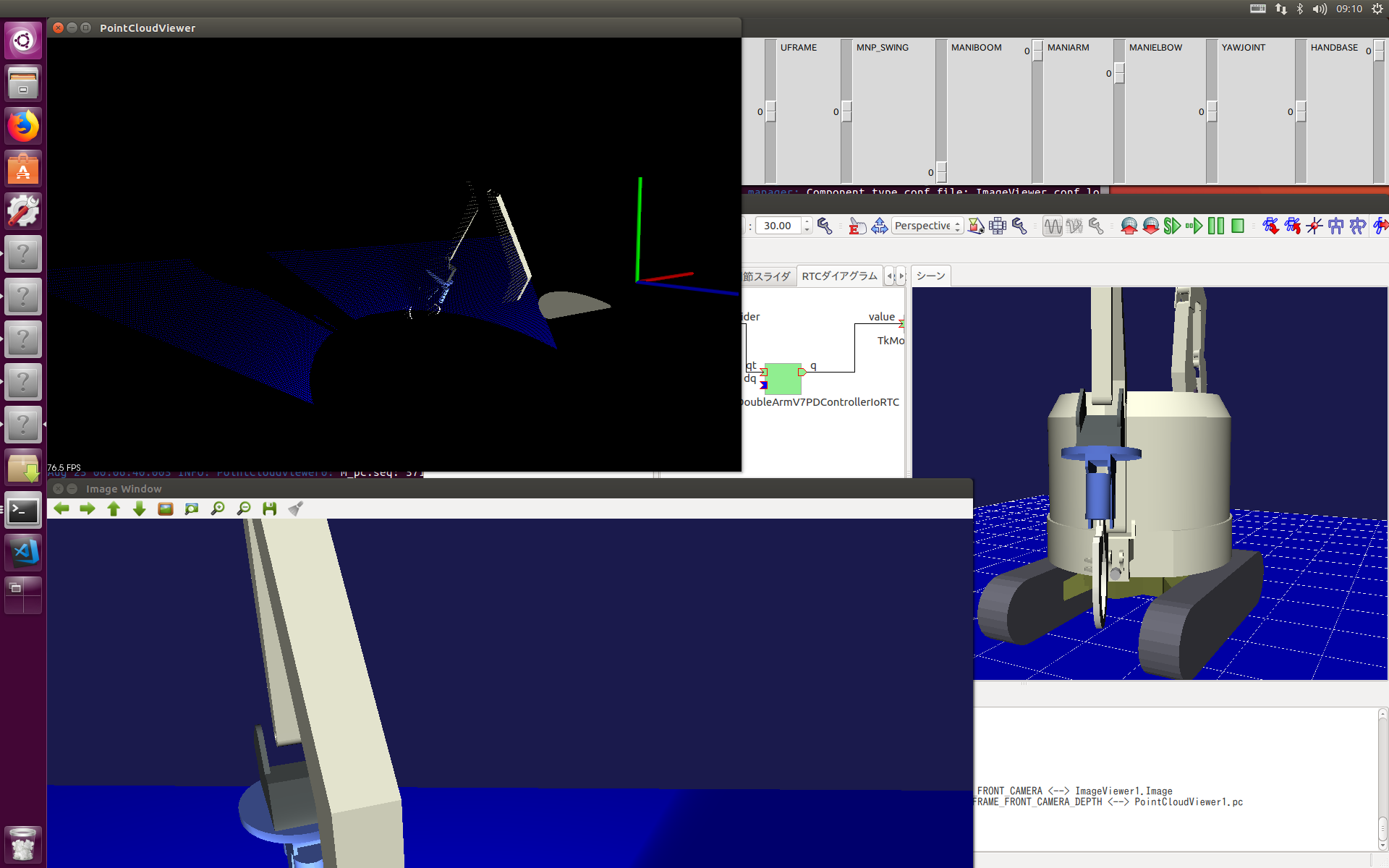
こちらでPointCoudViewerのコードの中で(#if 0の部分を1にして)受け取った全ての点の座標を表示させてみたのですが、以下のようになります。
0 0,0 -0.00804289,0.0059819,-0.0100392 004c1a1a
1 1,0 -0.00799262,0.0059819,-0.0100392 004c1a1a
2 2,0 -0.00794235,0.0059819,-0.0100392 004c1a1a
3 3,0 -0.00789209,0.0059819,-0.0100392 004c1a1a
4 4,0 -0.00784182,0.0059819,-0.0100392 004c1a1a
5 5,0 -0.00779155,0.0059819,-0.0100392 004c1a1a
6 6,0 -0.00774128,0.0059819,-0.0100392 004c1a1a
7 7,0 -0.00769101,0.0059819,-0.0100392 004c1a1a
8 8,0 -0.00764074,0.0059819,-0.0100392 004c1a1a
9 9,0 -0.00759048,0.0059819,-0.0100392 004c1a1a
(中略)
76790 310,239 0.00753975,-0.0060318,-0.0100386 006a7676
76791 311,239 0.00759002,-0.0060318,-0.0100386 006a7676
76792 312,239 0.00764028,-0.0060318,-0.0100386 006a7676
76793 313,239 0.00769055,-0.0060318,-0.0100386 006a7676
76794 314,239 0.00774081,-0.0060318,-0.0100386 006a7676
76795 315,239 0.00779108,-0.0060318,-0.0100386 006a7676
76796 316,239 0.00784134,-0.0060318,-0.0100386 006a7676
76797 317,239 0.00789161,-0.0060318,-0.0100386 006a7676
76798 318,239 0.00794187,-0.0060318,-0.0100386 006a7676
76799 319,239 0.00799214,-0.0060318,-0.0100386 006a7676
x,y,z座標ともこのようなオーダでz座標は-0.01でほぼ一定です。
何か違いの生じる原因になりそうなことを教えていただけると幸いです。
色の問題があるのはわかっています。色の順番はBGRの方が、PCLの内部表現にマッチするのではないかと思い、研究室内ではそのような仕様に変更していました。しかし、その件はここでは保留します。