こんにちは。東京工芸大学の大八木です。
ボディ/リンクビューに表示される干渉データについて質問があります。
モデル同士が干渉した際に、表示されるデータを基にシンプルコントローラ内でモデルの制御を行いたいと考えています。
以下の図のようにフリッパが2つ干渉している際に、現状では1つのリンクを対象に干渉相手のリンク名を確認できます。どのように設定すれば2つもしくは全てのリンク名と干渉相手のリンク名を一度に表示、確認をすることができますか?

よろしくお願いいたします。
こんにちは。東京工芸大学の大八木です。
ボディ/リンクビューに表示される干渉データについて質問があります。
モデル同士が干渉した際に、表示されるデータを基にシンプルコントローラ内でモデルの制御を行いたいと考えています。
以下の図のようにフリッパが2つ干渉している際に、現状では1つのリンクを対象に干渉相手のリンク名を確認できます。どのように設定すれば2つもしくは全てのリンク名と干渉相手のリンク名を一度に表示、確認をすることができますか?
よろしくお願いいたします。
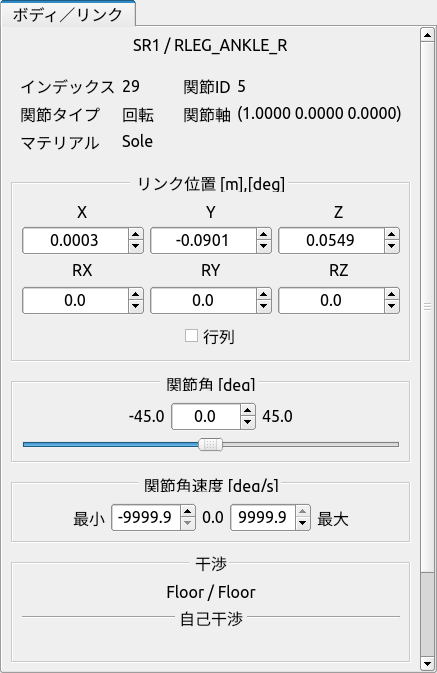
これは以下のボディ/リンクビューの「干渉」の部分を指していますでしょうか。
現状では同時に複数のリンクに関してこの表示を行うことはできません。
参考までにお聞きしたいのですが、表示としてはこの表示のように文字列で干渉しているリンク名などを表示するのがよろしいでしょうか?ただ、「表示されるデータを基にシンプルコントローラ内でモデルの制御を行う」ことと、GUI上に文字列で表示されていることは、あまりマッチしないようにも思えます。
実機においては通常コントローラから外界との接触が直接分かるようなことは無く、センサを介してそのような情報を取得することになるので、シミュレーションにおいてもそのようなやり方のほうがよいかもしれません。ただ実機を動かすことを考慮しなくてもよい場合は、シミュレーション世界で得られる干渉情報を直接参照できると便利なことがあるかもしれませんね。
そのあたりも含めて具体的にどのような仕組みが必要かについてご意見いただけるとうれしいです。
ご回答ありがとうございました。
現在考えている流れとしまして、シミュレーション中に得られる干渉情報をコントローラに随時参照させ、その情報を基に旋回、停止、フリッパを回す といった動作を行わせることで、ロボットがどのような経路を辿るかの検証をしようと思っていました。
そのため、モデルの有している各リンクをナンバリングし、コントローラ側でその番号を指定することでそのリンクの干渉相手(名前/リンク名)の情報を取得するような仕組みが欲しいと考えております。
しかし、本当にやりたい事としましては、AISTSimulatorで使用できるchoreonoid/sample 内のContactForceExtractionをAGXSimulatorでも使用して干渉情報を扱いたいと考えておりました。
現在AGXSimulatorを使用しているのですが、ContactForceExtractionが使用できないため、ボディ/リンクビューを利用して干渉情報の取得できないかと考えておりました。
AGXSimulatorではContactForceExtractionを扱うことは出来ないのでしょうか?