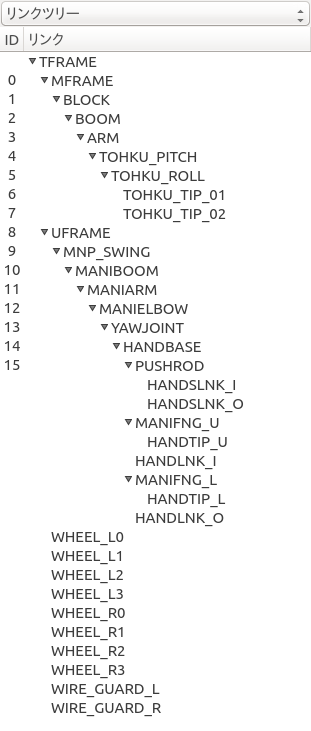
新しいプロジェクトにDoubleArmV7A.bodyを読み込んで,保存すると,jointPositionsとinitialJointPositionsの要素数は32個になります.しかし,配布されているcnoidファイルでは16個です.なぜでしょうか?
-
id: 2
name: "DoubleArmV7"
plugin: Body
class: BodyItem
data:
modelFile: "${PROJECT_DIR}/share/model/DoubleArmV7/DoubleArmV7A.body"
currentBaseLink: "TFRAME"
rootPosition: [ 0, 0, 0.52 ]
rootAttitude: [
1, 0, 0,
0, 6.123234e-17, -1,
0, 1, 6.123234e-17 ]
jointPositions: [
0.000000, 0.000000, -1.221730, 2.617994, 0.000000, 0.000000, 0.000000, 0.000000, 0.000000, 0.000000,
0.000000, 0.000000, 0.000000, 0.000000, 0.000000, 0.000000, 0.000000, 0.000000, 0.000000, 0.000000,
0.000000, 0.000000, 0.000000, 0.000000, 0.000000, 0.000000, 0.000000, 0.000000, 0.000000, 0.000000,
0.000000, 0.000000 ]
initialRootPosition: [ 0, 0, 0.52 ]
initialRootAttitude: [
1, 0, 0,
0, 2.22044605e-16, -1,
0, 1, 2.22044605e-16 ]
initialJointPositions: [
0.000000, 0.000000, -1.221730, 2.617994, 0.000000, 0.000000, 0.000000, 0.000000, 0.000000, 0.000000,
0.000000, 0.000000, 0.000000, 0.000000, 0.000000, 0.000000, 0.000000, 0.000000, 0.000000, 0.000000,
0.000000, 0.000000, 0.000000, 0.000000, 0.000000, 0.000000, 0.000000, 0.000000, 0.000000, 0.000000,
0.000000, 0.000000 ]
zmp: [ 0, 0, 0 ]
collisionDetection: true
selfCollisionDetection: false
isEditable: true