As a part of my Mater’s project work : design of Humanoid Robot, presently I am working on Actuator selection. The idea is to do a preliminary actuator selection based on the Joint Torque Requirements. And after that I would like to work on the mechanism design.
What I planned to do was to change the mass inertia properties of SR1 model according to my requirement and then from the project SR1Walk.cnoid I could get the speed and torque experienced by the different joints.
From the tutorials I got to know that the controller o/p is torque. But I am not familiar with c++ coding and I am not able to extract these values after the simulation. It would be wonderful if someone could help me with this.
It need not be this exact problem but a method/tutorials/skills I have to learn to achieve my goal would also be very helpful for me.
@nakaoka@hattorishizuko
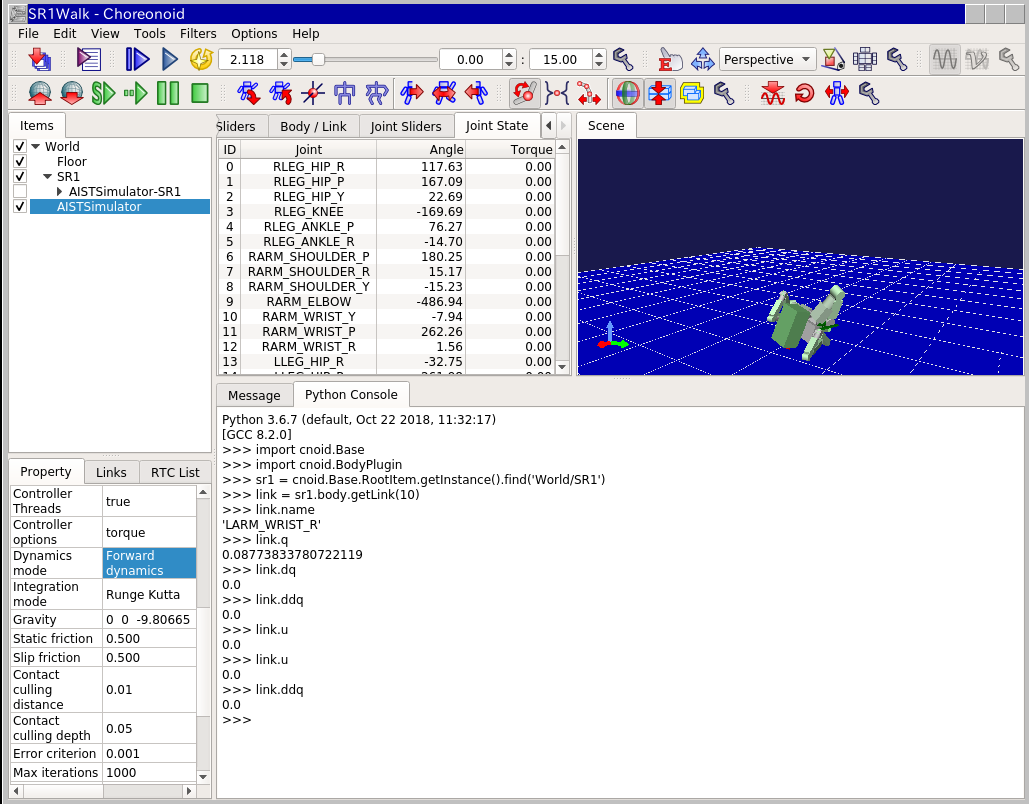
Just want to confirm that Link::u() API is officially obsolete, or not functioning by bug or model configuration?
If it is officially obsolete, we probably have to update the Joint State view and the document on SimpleController.