こんにちは。はじめまて、
WRS2025のシミュレーション部門に出場するために、最近choreonoidを触らせて頂いております。まだ不慣れですが、思っていたよりも使いやすいシミュレータで驚きました。
さて、AGX版のAizuSpiderを動かしていて、階段登りの際などに、サブクローラの履帯が剥がれ落ちることがよくあるのですが、このような現象を回避するのに、調整すべきbodyファイルのパラメタなどありましたら、お詳しい方、ご教授頂けないでしょうか。
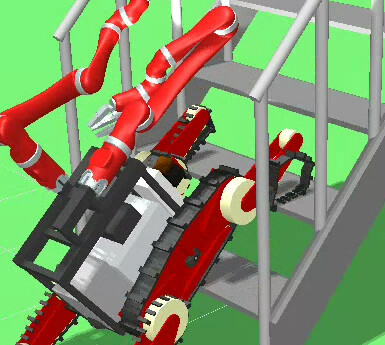
画像のシミュレーションでは、配布されているファイルから hingeCompliance、nodeDistanceTension、nodeThickerThickness
などの値を少し調整しています。
(2つ目までは、サブクローラの履帯を回すと根本の軸が回るという現象を避けるために調整しました。3つ目は階段を登り易くするために調整しました。)
1 Like
nakaoka
2
WRS2025のシミュレーション部門に出場されるのですね。思っていたよりも使いやすいとのことで、ありがとうございます。
サブクローラの履帯が剥がれ落ちることがよくあるというのは問題ですね。
私がWRS2018の際にこのモデルをAGX用に調整していたときには、そのようなことはなかったのですが、AGXのバージョンもその後変わっているので、少し挙動が変わったところがあるのかもしれません。
マニュアルをみてパラメータも調整していただいているようですね。そのようにパラメータを少しずつ変えながら試行錯誤するのがよいかと思いますが、それをしてもまだ外れるとなると困りますね。
何か解決策を提示したいところなのですが、当方で現在AGXを使える環境にないため、テストすることができずにおります。
AGX以外の調整箇所ということですと、シミュレーションの時間分解能を細かくすることで、外れにくくなるかもしれません。時間分解能については以下を参照ください。
https://choreonoid.org/ja/documents/latest/simulation/simulation-project.html#simulation-time-step
WRSの競技は恐らく5ミリ秒(0.005秒)のタイムステップで実施されるかと思うのですが、それより粗くなっていないでしょうか。5ミリ秒でもダメな場合は、もう少し細かくするとどうなるか試してみてください。
あとはクローラを動かす際の速度が速すぎると外れやすくなるかもしれません。もしそのようなことがありましたら、コントローラ側で調整することになるかと思います。
投稿者様
鈴木@JAEAです。
恐れ入りますが、もし可能であれば、
どのように履帯が外れるのかを確認したいので、
その様子を動画で共有いただけますか。
既にご覧になったかと思いますが、
AGXのクローラベルト(履帯)の調整については、
AGX Vehicle Continuous Track (AGXクローラ) — Choreonoid 開発版 ドキュメント
このページに記載されています。
調整すべきパラメータですが、
履帯の形状を変更しないのであれば、私の経験では
- nodeDistanceTension
- stabilizingHingeFrictionParameter
- minStabilizingHingeNormalForce
- hingeCompliance
- hingeSpookDamping
- nodesToWheelsMergeThreshold
- nodesToWheelsSplitThreshold
を上記のマニュアルの手順に従って調整すればよいと思います。
具体的な調整方法としては、
とにかく各パラメータの基数や指数等を1つずつ増減させて
ベルトの様子を確かめてください。
お二方、質問にご回答ありがとうございます。
はい。マニュアル拝読させて頂いております。(調整項目が多すぎてちょっとビビりましたが…^^;)
質問投稿時からもう少し弄った結果、実は現在は頻度が下がりましたが、階段登りがスムーズに行えないときに長い時間サブクローラが階段の段板に押し当たると発生します。(このあとすぐ動画を送ります)
”Sorry, new users can not upload attachments.”
って言われちゃいました^^;
取り急ぎ、クラウドに上げて共有リンク発行しました
(もし、このコミュニティ規約を犯していたら教えてください。消します)
動画の共有ありがとうございました。
ベルトが駆動輪に食い込んでいる感じに見えるので、
nodeDistanceTensionの値が大きい可能性がありますね。
nodeDistanceTensionの値を小さくして、ノード間に隙間ができない値を探してみてください。